
The future of transportation is … complicated.
Connected and automated vehicles, collectively termed CAVs, are making up an increasing share of the vehicles on the road. Fully-autonomous vehicles have already hit the streets in Gainesville. Domino’s Pizza promises a self-driving delivery fleet in the Houston area by the end of 2019.
That said, a Jetsons-esque transportation system is a long way from reality. There will be many intermediate steps before everyone travels in a “smart” vehicle. Those steps include a time when driverless, connected, and traditional vehicles will share the road all at the same time. This creates myriad challenges for transportation agencies.
Today, traffic flow through signalized intersections is a significant problem. According to the National Transportation Operations Coalition (NTOC), delays at traffic signals are estimated to account for between five and 10 percent of all traffic delays on major roadways. Connected vehicle technology may hold a solution to reducing the delay experienced at traffic signals.
Connected vehicles can communicate with the infrastructure around them, including traffic signals, using Dedicated Short Range Communication (DSRC) technology. If the vehicles and the signals are connected, the signals have the potential to optimize their cycles and improve traffic flow in real time. Signals can hold a green light a little longer to let more cars through the intersection, for instance. The signals could even tell fully automated vehicles to accelerate (up to a maximum speed) or to modify their trajectory to maximize the capacity of the intersection.
But what happens when conventional vehicles are in the mix? Can traffic signals account for drivers whose vehicles do not communicate with the infrastructure and whose behaviors cannot be predicted or controlled by the traffic signals? That is the question that the University of Florida Transportation Institute (UFTI), in partnership with the Florida Department of Transportation, set out to answer.
“Connected and autonomous vehicle technology is evolving quickly and presenting new scenarios to agencies all the time,” said Dr. Lily Elefteriadou, UFTI Director and Principal Investigator for the research project. “But we are also still learning how human beings will interact with the technology, not just at intersections, but at the network level. There are many questions still to be answered.”
The team was not starting from scratch. This research project was a follow-on to previous work funded by the National Science Foundation that produced an algorithm for communicating with CAVs as they approached intersections. For this effort, the team would have to develop a reliable way to track unconnected vehicles as they approached intersections and then merge that information with the existing DSRC-based algorithm.
“We know conventional vehicles are going to be on the roads for a long time,” said Dr. Sanjay Ranka, a computer science professor at UFTI and co-lead for the project. “We want to make the infrastructure to be as smart as possible to account for this.”
Rolling Toward a Rolling Horizon
The researchers decided to track the trajectories of conventional vehicles using radar and video equipment mounted to the signals. The radar would record the vehicle’s distance from the light and its speed, and then fuse that information with that from the CAVs. Finally, all the information would have to be delivered to the traffic signal control system so it could adjust.
The success of the data calculation and fusion depends on collecting data at regular, repeated intervals. The algorithm would need to produce the combined information in enough time to provide meaningful trajectories to the traffic signal. The researchers used a “rolling horizon” concept to produce this time gap and set a rhythm for analysis.
The algorithm uses the communication distance and speeds of approaching vehicles to define an interval for calculation. The algorithm collects data during the interval and, at the end of the interval, estimates optimal trajectories and signal control. Those results are then implemented during the next data-collection interval. The system adjusts to current traffic while always looking for the next group of vehicles – a rolling horizon.
From MATLAB to TERL
Once the team expanded the algorithm, they simulated the system using MATLAB software. They tested 3,000 scenarios considering varying demand levels, communication ranges, CAV percentage, and traffic saturation. After completing the simulations and making adjustments, the system was implemented and tested at FDOT’s Traffic Engineering Research Laboratory (TERL) facility.

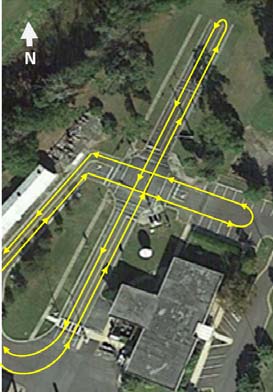
The tests at TERL included several human-driven vehicles, connected vehicles (but not fully-autonomous), and fully-autonomous vehicles. Testing was done at a four-leg intersection with six approaching lanes and four departing lanes. No turning lanes were used in the testing, to simplify the phasing patterns.
Each test was 15 minutes long and the vehicles traveled along a predetermined path. The maximum speed for all scenarios was 15 mph because of the limited approach distances at TERL. The scenarios ranged from just two connected vehicles to mixed traffic of four automated vehicles and two conventional vehicles.
Under each scenario, the team used four measures:
- Mean travel time
- Mean travel delay
- Phasing and green duration
- Vehicle trajectories (actual vs. recommended) for automated vehicles
Results
The first, and probably most important, finding of the tests was that the system accurately distinguished conventional vehicles from CAVs. While only a small sample, the system achieved 100 percent accuracy. A conventional vehicle was never mistaken for an automated vehicle.
But did the algorithm fuse this information properly and optimize the signal to account for all types of vehicles? Yes. For all scenarios, the average delay was close to the minimum.
The team confirmed that the expanded algorithm could account for traditional vehicles and CAVs in mixed traffic and could adjust to maximize traffic flow.
“This was a very limited test on a closed course, but the results are encouraging to inspire further research,” Elefteriadou said. “We learned a lot about what the next steps should be.”
That work includes expanding the algorithm to consider congested conditions, lane changing, better sensor fusion, and the presence of pedestrians and bicycles.
“We are currently working with FDOT on a project that would include pedestrian movements into the algorithm,” Elefteriadou said.
Ultimately, UFTI and FDOT would like to implement this technology in the I-STREET real-world testbed in Gainesville, possibly starting with the autonomous shuttle that has a route through the University of Florida campus.
“I-STREET would be a very complex environment for continued testing,” said FDOT Research Center Manager Darryll Dockstader. “But the work in these projects will necessarily combine with and enhance other I-STREET efforts. This is historic research.”
“It is very exciting to work with FDOT on these projects,” Elefteriadou said. “Transportation has not changed this much since the invention of the automobile over a century ago. We are conducting research on the ground floor of this change.”
We are still a long way from a driverless fleet. Moving to a fully-autonomous transportation system will require thousands and thousands of problems to be solved. These solutions will play their part in providing safer, less congested, and more productive transportation for us all.
Further Reading
BDV31-977-45 Development and Testing of Optimized Autonomous and Connected Vehicle Trajectories at Signalized Intersections
Final Report | Summary
